 Variable Thrust Vector Device
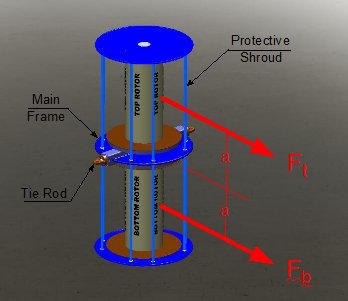
The basic components of a Variable Thrust Vector Device (VTVD) are as follows:
a solid tie rod with a warp attached to the front lug
and the bridles to the rear lug
a strong main frame which is free to rotate around
the tie rod
a top spinning rotor assembly
a bottom spinning rotor assembly
a protective shroud around the rotors to prevent
damage during normal operations
drives, sensors and electronics to provide the VTVD
with a level of autonomous operation as well as
under remote control over a data link
Operating principle of the VTVD
In operation each spinning rotor would be independently controlled and the force it generated would be proportional
to its speed of rotation.
The two equations that apply to the VTVD are:
Magnitude of the resultant force vector: FR = Ft + Fb
Magnitude of the rotating torque: Tr = Fb * a - Ft * a
(where Ft is the force generated by the top rotor, Fb is the force generated by the bottom rotor and a is the distance
from the center of the VTVD to the point on the rotor at which the force acts).
This simulation video below illustrates the basic effects of changing the speeds of the rotors on the movements of the
VTVD
Below is a more detailed step-by-step explanation of the VTVD operation
To move the trawl to a new position (i.e. downwards):
Compute new position thrust vector and optimum travel vector.
Increase speed of top rotor and/or reduce speed of bottom rotor. Due to the difference in the thrusts of the rotors, a
torque is developed, which heels the device outwards.
Increase speed of bottom rotor and/or reduce speed of top rotor. This will stop rotation of the device at the heel
angle determined by the travel vector. The horizontal component of this vector = spread force required. The vertical
component = force required to move the trawl downwards at preset speed.
Increase speed of bottom rotor and/or reduce speed of top rotor. This will rotate the device to the heel angle
determined by the new position force vector.
Equalise speeds of rotors, adjust to match magnitude of new force vector.
Monitor the depth, spread and force vector. Adjust force vector, if necessary, to maintain the set trawl parameters.
Variable Thrust Vector Device
The basic components of a Variable Thrust Vector Device (VTVD) are as follows:
a solid tie rod with a warp attached to the front lug
and the bridles to the rear lug
a strong main frame which is free to rotate around
the tie rod
a top spinning rotor assembly
a bottom spinning rotor assembly
a protective shroud around the rotors to prevent
damage during normal operations
drives, sensors and electronics to provide the VTVD
with a level of autonomous operation as well as
under remote control over a data link
Operating principle of the VTVD
In operation each spinning rotor would be independently controlled and the force it generated would be proportional
to its speed of rotation.
The two equations that apply to the VTVD are:
Magnitude of the resultant force vector: FR = Ft + Fb
Magnitude of the rotating torque: Tr = Fb * a - Ft * a
(where Ft is the force generated by the top rotor, Fb is the force generated by the bottom rotor and a is the distance
from the center of the VTVD to the point on the rotor at which the force acts).
This simulation video below illustrates the basic effects of changing the speeds of the rotors on the movements of the
VTVD
Below is a more detailed step-by-step explanation of the VTVD operation
To move the trawl to a new position (i.e. downwards):
Compute new position thrust vector and optimum travel vector.
Increase speed of top rotor and/or reduce speed of bottom rotor. Due to the difference in the thrusts of the rotors, a
torque is developed, which heels the device outwards.
Increase speed of bottom rotor and/or reduce speed of top rotor. This will stop rotation of the device at the heel
angle determined by the travel vector. The horizontal component of this vector = spread force required. The vertical
component = force required to move the trawl downwards at preset speed.
Increase speed of bottom rotor and/or reduce speed of top rotor. This will rotate the device to the heel angle
determined by the new position force vector.
Equalise speeds of rotors, adjust to match magnitude of new force vector.
Monitor the depth, spread and force vector. Adjust force vector, if necessary, to maintain the set trawl parameters.
Copyright Active Fishing Systems 2016
Active Fishing Systems
The Emerging Light in Fishing Technology
Active
Trawl
System